Archive For The “Projetos” Category
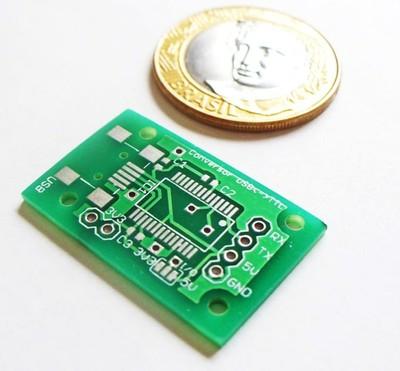
O conversor é tipicamente utilizado na conexão de microcontroladores ao PC, via USB. Adicionando-se um conversor TTL-RS232 (MAX 232, por exemplo) facilmente obtem-se um conversor RS232-USB.
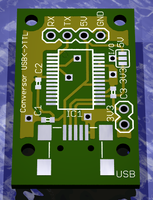
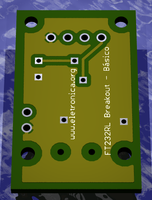
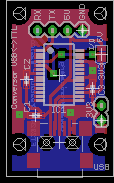
Outros arquivos (GERBER, SCH e BRD) podem ser baixados aqui:
Este projeto vai ensinar você a criar o seu próprio dispositivo de monitoramento cardíaco, um ECG/EKG (eletrocardiógrafo) simples.
Nos Estados Unidos e no resto do mundo, milhões de pessoas perdem as suas vidas por problemas cardíacos. Estes problemas acompanham doenças como diabetes, estresse, etc. Antes de continuar a explicar a você o que eu fiz, gostaria de ALERTAR você. 500mA (mili-ampéres) em 220V irá destruir completamente o seu sistema nervoso (então alimente isso a partir de baterias!), verifique tudo duas vezes e a responsabilidade é toda sua.
OK! Eu acho que posso continuar agora. Este foi um trabalho estudantil de quando eu iniciei no campo da biomedicina. Para fazer o meu CV parecer melhor eu queria contruir alguma coisa nessa área e fiz um ECG. A primeira coisa que eu procurei fazer foi ir até o google.com e pesquisar por projetos similares. Lá eu encontrei um bom número de projetos sobre o assunto. Alguns para logar dados de pacientes com doenças cardíacas, alguns outros sistemas de monitoramento cardíaco futuristas e mais alguns feitos apenas por diversão, como o meu.
Vamos iniciar com a definição do que é um ECG e algumas coisas sobre ele (retirado de “Introduction to Medical Electronics Application”, por D. Jennings, A. Flint, BCH Turton, LDM Nokes):
“O coração humano pode ser considerado um grande músculo que bate apenas por contrações musculares. Conseqüentemente, estas contrações causam uma diferença de potencial. O estudo da medida do potencial produzido pelo músculo cardíaco é chamada de eletrocardiologia.
O campo despolarizante no coração é um vetor que altera a sua direção e magnitude através do ciclo cardíaco. A colocação de eletrodos na superfície do paciente determina a visão que será obtida desse vetor em função do tempo.
O esquema de posicionamento mais utilizada dos eletrodos é mostrada na Figura 1. Aqui, a diferença de potencial é medida entre os braços direito e esquedo, entre o braço direito e a perna esquerda e entre o braço esquerdo e a perna esquerda. Estas três medidas podem ser referenciadas como I, II e III, respectivamente. Este posicionamento foi desenvolvida por Einthiven, que determinou que conhecendo o estado das medidas dos sinais das ligações I e II, o sinal que ia ser visualizado em III poderia ser calculado. E este é o princípio básico do posicionamento das ligações do ECG: a partir dos vários recursos disponíveis, a despolarização do coração pode ser calculada.
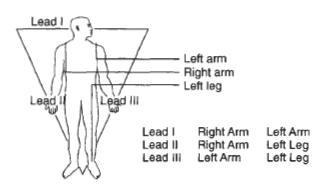 Figura 1
Figura 1
Conseqüentemente, o sinal do ECG mostra ao clínico as formas de ondas elétricas associadas com as contrações dos ventrículos e artérias. Apartir de um ECG, o clínico pode determinar o tempo das contrações dos ventrículos e artérias e avaliar a magnitude relativa das polarizações e despolarizações ventriculares e arteriais. Esta informação pode permitir a identificação de pequenos bloqueios do coração. Depois de um ataque cardíaco, o ECG do paciente mostra alterações de sincronismo e forma de ondas, transmitidas através dos tecidos musculares. Estas alterações são associadas com danos cardíacos causados pelo ataques do coração”.
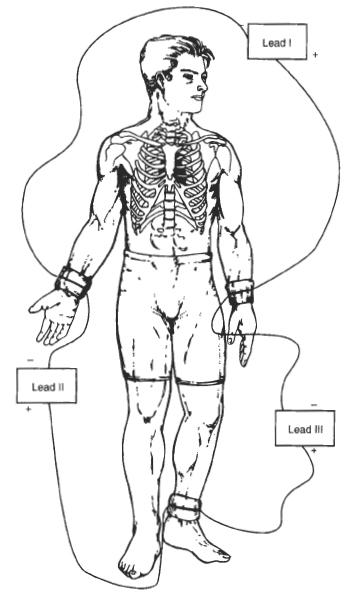
Figura 2., diagrama de conexão
Depois desta pequena introdução sobre o ECG, vamos falar da descrição eletrônica. A maneira mais simples de explicar como isso funciona é fazer um diagrama de blocos.
O sinal que vem do corpo inicia sendo amplificado (este sinal é muito pequeno e fraco, variando entre 0,5mV e 5,0mV), filtrado (para remover o ruído), amostrado (para amostrar eu preciso de um conversor Analógico/Digital, conhecido como ADC) e então envio ao computador através de uma interdace RS232 (uma interface sem fio ou qualquer outro tipo poderia ser escolhida, mas a RS232 é simples e rápida para desenvolver).
Os primeiros dois passos são mostrado na Figura 3.
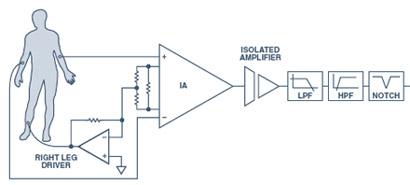
Figura 3., Blocos ECG
Os amplificadores que nós usamos na engenharia de biomedicida, aquisição de dados ou qualquer outro lugar onde é interessante representar uma pequena flutuação de tensão sobreposto em um offset de tensão, são chamados amplificadores de Instrumentação. Estes amplificadores possuem uma grande CMMR (Commom Mode Rejection Ratio), o que significa que eles têm a habilidade de um amplificador diferencial em não passar (rejeitar) a parte do sinal que é comum nas entradas + e -. Os famosos produtores de amplificadores de instrumentação são a Texas Intruments e a Analog Devices. Eu utilizei um amplificador da segunda empresa, Analog Devices. O AD620, amplificador de intrumentação, e o OP97, amplificador operacional de alta precisão. Como eles precisam de uma fonte de tensão negativa, eu a gerei com o LTC1044 da Linear, conversor de tensão com chaveamento de capacitor, Figura 4. A tensão fornecida é 5V. O esquemático é mostrado na Figura 5, e mais detalhes sobre o seu funcionamento pode ser visto em seu datasheet.
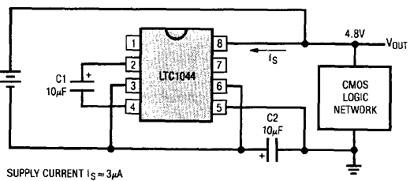
Figura 4., LTC1044, gerador de tensão negativa

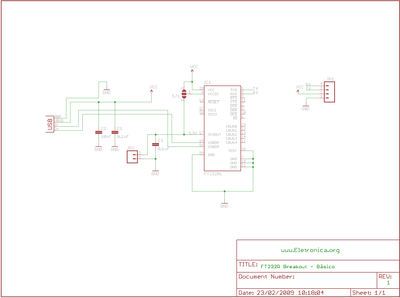
Figure 5., ECG Esquemático do ECG
Os ruídos podem vir das contrações musculares, interferências da rede na faixa de 50-60Hz, ruídos do contato dos eletrodos, ruídos vindo de qualquer outro dispositivo eletrônico, etc. O filtro para a aplicação do ECG deve ser um filtro de corte (passa-alta e passa-baixa). Ele deve filtrar a faixa de 0.5Hz até 50Hz. Eu criei um filtro simples RC passa-alta e passa-baixa, conectados em série (apenas dois capacitores e resistores).
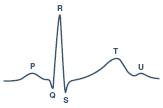
Figura 6., Sinal do ECG
O ADC usado foi o interno da CPU Atmel, ATMega8. O código está aqui:
-
.include “m8def.inc”
-
.def temp = r16
-
.equ CLOCK = 4000000 ; define frequency speed
-
.equ BAUD = 9600 ; define baud rate of sending data
-
.equ UBRRVAL = CLOCK/(BAUD*16)-1
-
main:
-
ldi r16, 0b00100000 ; configure the ADC
-
out ADMUX, r16
-
ldi r17, 0b10000111
-
out ADCSRA, r17
-
; Stackpointer initialisation
-
ldi temp, LOW(RAMEND)
-
out SPL, temp
-
ldi temp, HIGH(RAMEND)
-
out SPH, temp
-
; Baudrate configuration
-
ldi temp, LOW(UBRRVAL)
-
out UBRRL, temp
-
ldi temp, HIGH(UBRRVAL)
-
out UBRRH, temp
-
; Frame-Format: 8 Bit
-
ldi temp, (1<<
-
out UCSRC, temp
-
sbi UCSRB,TXEN ; TX activate
-
ADC:
-
ldi r18, 0b00100000
-
out ADMUX, r18
-
ldi r19, 0b11000111
-
out ADCSRA, r19
-
loop:
-
in r24, ADCSRA ; check if ADC done
-
sbrc r24, 6
-
rjmp loop
-
in temp, ADCH ; fill the converted ADC value to temp
-
rcall serout ; send ADC value to RS232(to computer)
-
rjmp ADC
-
serout:
-
sbis UCSRA,UDRE
-
rjmp serout
-
out UDR, temp
-
ret
Os resultados podem ser vistos nas figuras a seguir. Eu utilizei o LabView para ver o ECG do meu coração.
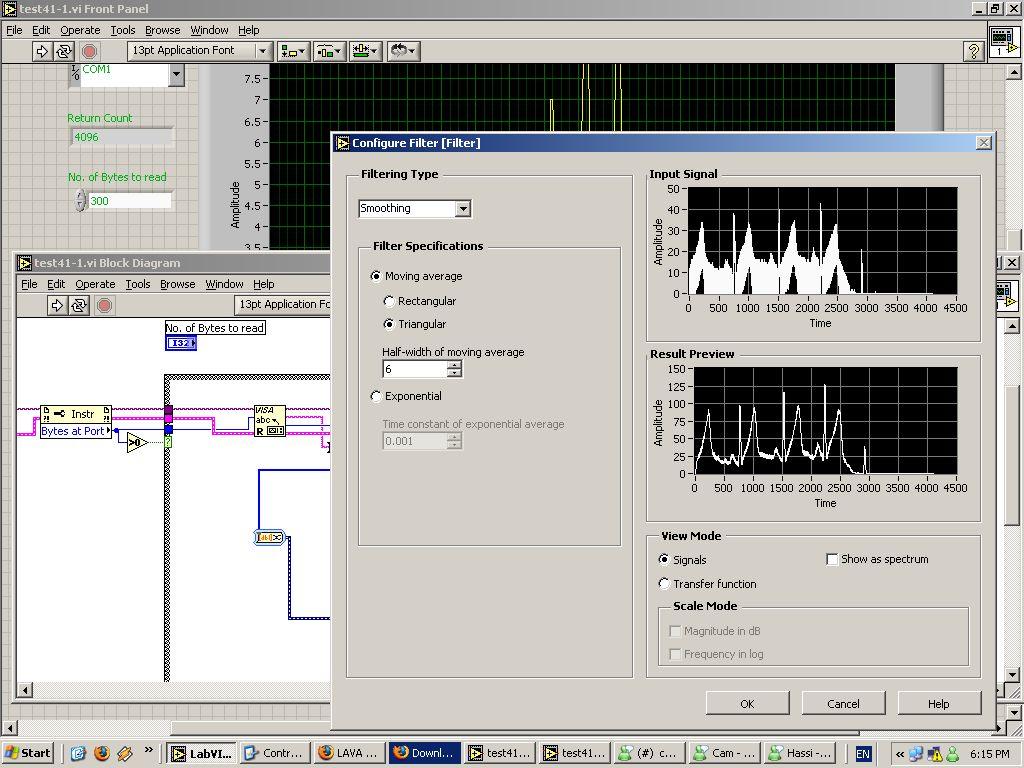
Figura 7. Resultado do ECG no LabView
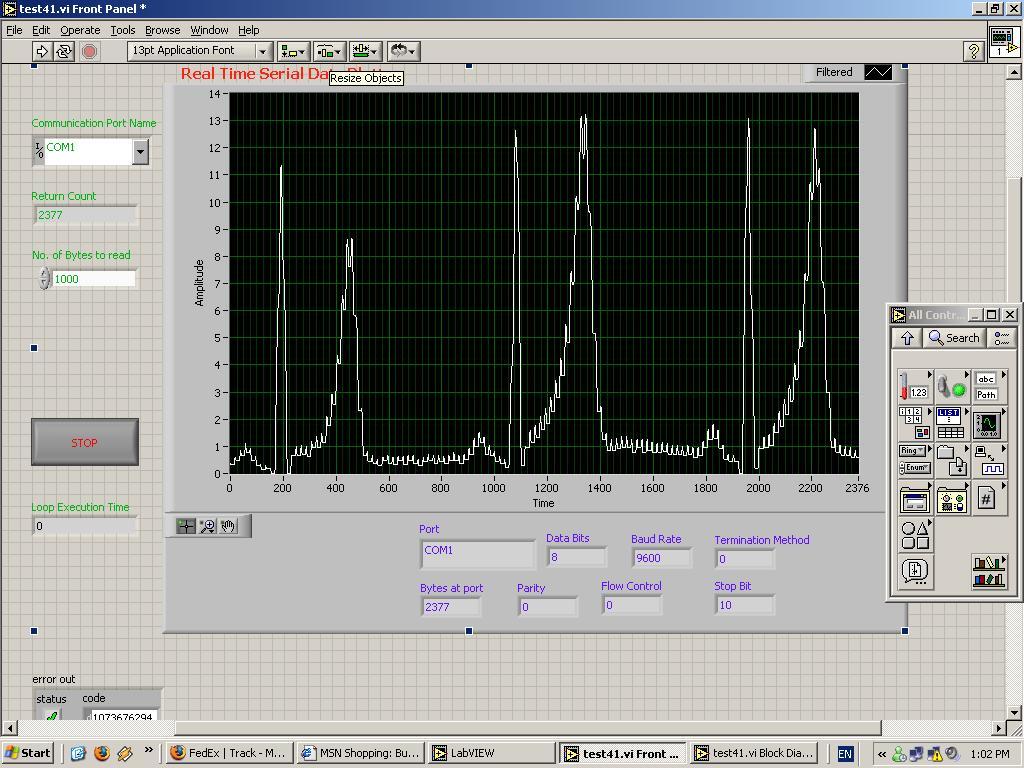
Figura 8. Resultado do ECG no LabView

Figura 9. Este sou eu com os eletrodos (a imagem na camisa é o logo da Associação de Basquete da Bósnia)
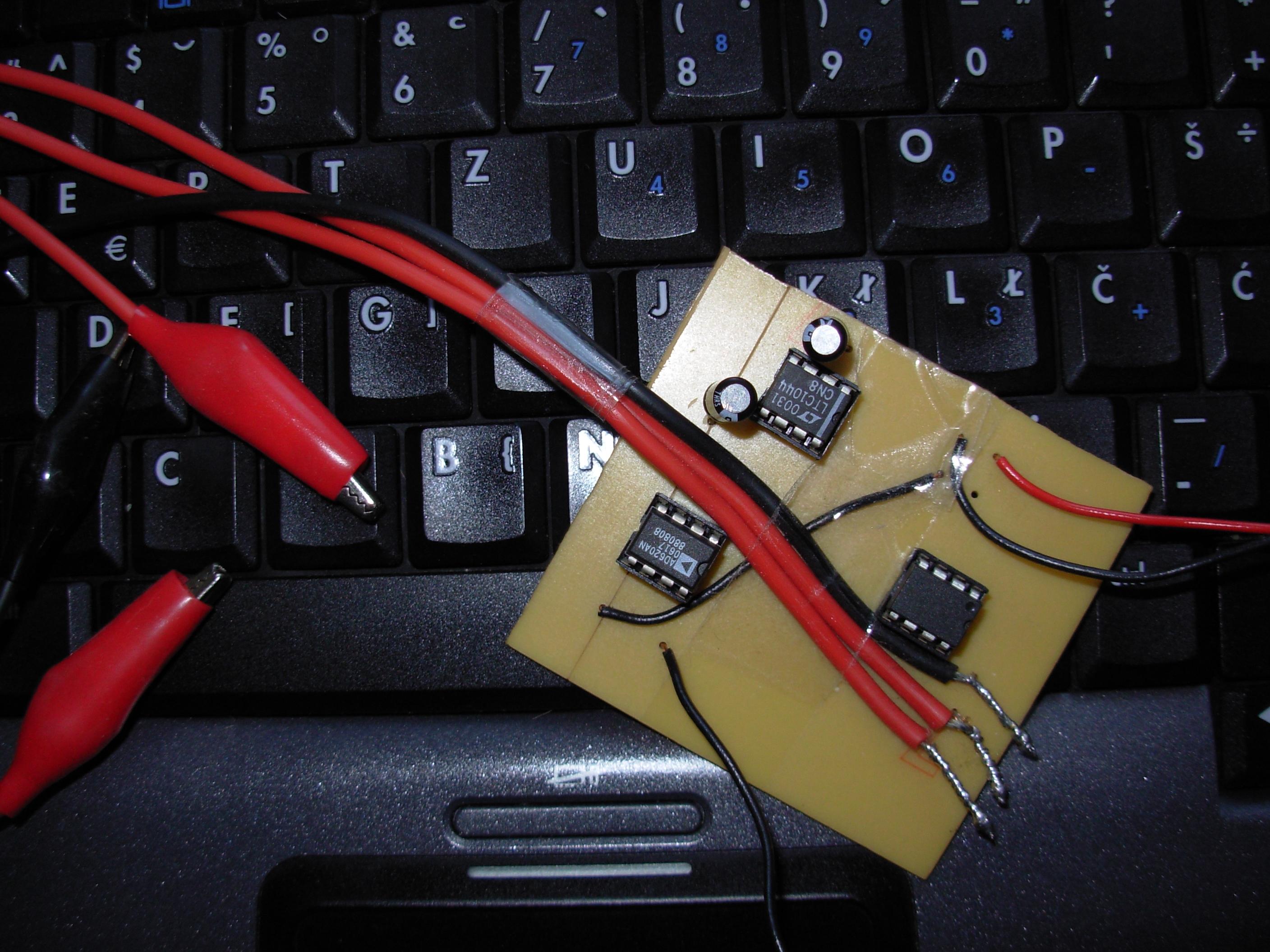
Figura 10. A placa do ECG criada por mim, frente
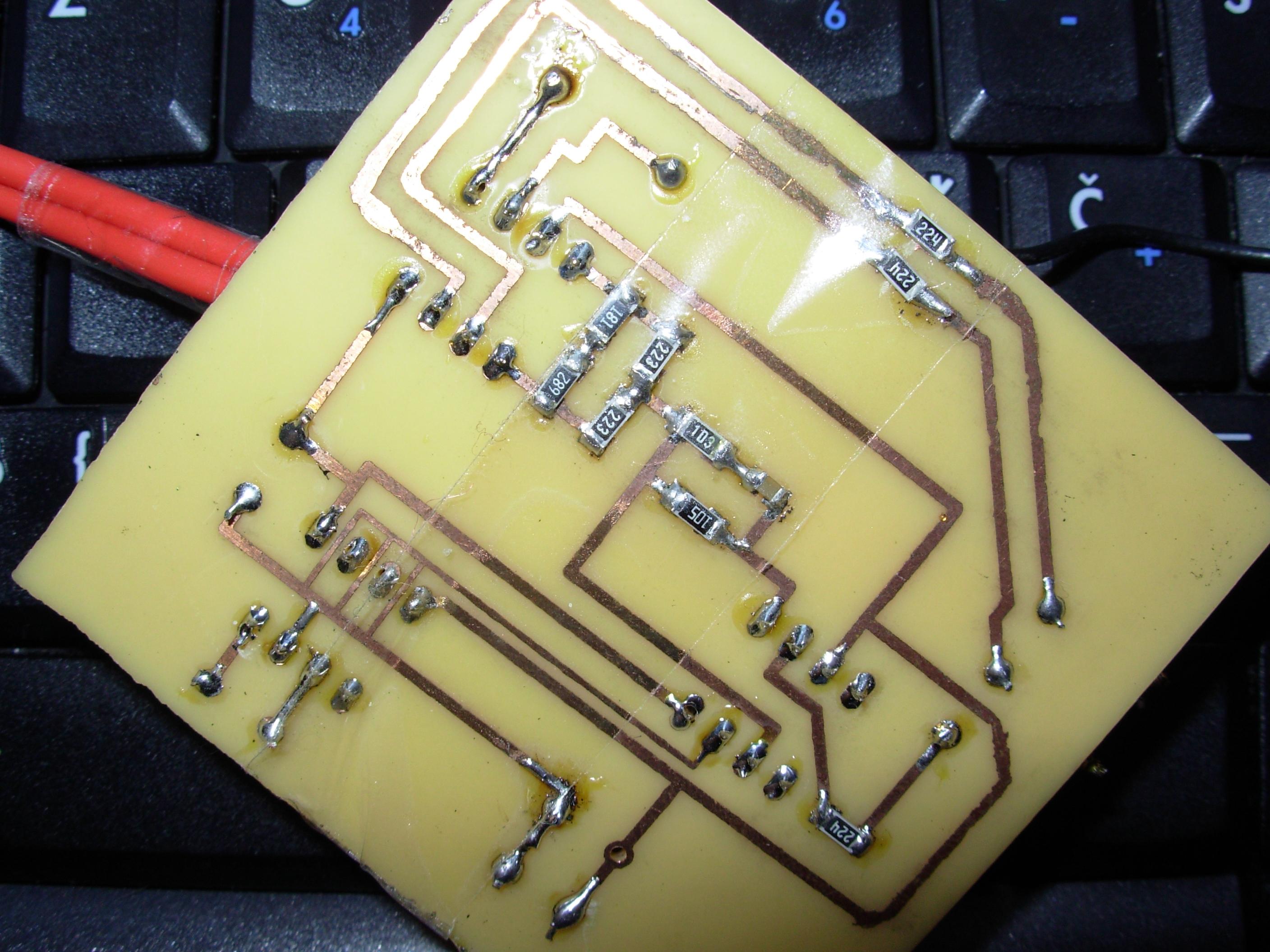
Figura 11. A placa do ECG criada por mim, lado de baixo
Adaptado, com autorização do autor, por Eletronica.org.
Veja o original, em inglês, em http://www.e-dsp.com/how-to-build-your-own-heart-monitoring-device-a-simple-ecg/
Seu princípio de funcionamento se baseia na utilização de um simples microfone, capaz de gerar um sinal muito intenso devido à alta freqüência e a intensidade do som propagado pelo bater palmas ou estalar os dedos. Esse sinal deve ser interpretado por um circuito como um pulso de entrada que está ligado a um flip-flop, o qual será responsável por ligar ou desligar o interruptor do sistema. O desenvolvimento do projeto segue abaixo.
Introdução
Para a prática proposta, buscando sempre auxílio no conhecimento de trabalhos anteriores e integrando um pouco com as necessidades e tecnologias atuais, devemos projetar um sistema de controle que consiste em um interruptor eletrônico, o qual deve ser capaz de ligar e desligar um LED apenas com o Bater as Palmas da Mãos ou um Estalar de Dedos.
Seu principio de funcionamento se baseia na utilização de um simples microfone, capaz de gerar um sinal muito intenso devido à alta freqüência e a intensidade do som propagado pelo Bater as Palmas ou Estalar os Dedos. Esse sinal deve ser interpretado por um circuito como um pulso de entrada que está ligado a um flip-flop, o qual será responsável por ligar ou desligar o interruptor do sistema.
O desenvolvimento do projeto segue abaixo.
Desenvolvimento
Para apresentar o projeto, iremos dividir sua apresentação em partes:
1. Captação do som e filtragem
Para captar o sinal sonoro, usaremos como entrada para o circuito um microfone de eletreto. Seu diagrama esquemático é mostrado abaixo:
Figura 01: Entrada do circuito, com captação do som.
O microfone capta a vibração do ar provocado pelo som, transformando essa vibração mecânica em impulsos elétricos, produzindo ondas de mesma freqüência do som que o gerou. Ele está ligado em série com o resistor de 10k ohm para limitar a corrente que passa pelo microfone. É necessário também observar a polaridade do microfone.
Em seguida, o sinal gerado passa por um filtro que elimina a componente contínua do sinal (devido à tensão dc de 5V) e atenua parte da freqüência da fala, já que somente é desejável que o circuito seja acionado por ruídos muito intensos. Dessa forma, um capacitor de 200 nF já é suficiente para filtrar a componente contínua.
2. Amplificação do sinal e pullup
O som produzido por palmas gera sinais elétricos de amplitudes muito baixas no microfone de eletreto. Esses sinais precisam ser amplificados e nesse projeto se decidiu por um ganho de 330.
Figura 02: Estágios de amplificação
Observe que o nosso amplificador é inversor, desta forma o sinal entra no terminal inversor do amplificador. Logo, para uma resistência de 330k ohm na realimentação, teremos aproximadamente um ganho de 330.
Novamente, ao capturarmos o sinal no final do estagio de amplificação, teremos agora uma tensão de pico equivalente a cerca de 4 a 5 V.
Essa tensão de saída do comparador vai ativar um temporizador, que será explicado a seguir.Para garantir um disparo sem interferencia no trigger do nosso temporizador, conectamos um filtro de 680 nF e uma resistência de pullup de 10k ohm.
Novamente, ao capturarmos o sinal no final do estagio de amplificação, teremos agora uma tensão de pico equivalente a cerca de 4 a 5 V.
Essa tensão de saída do comparador vai ativar um temporizador, que será explicado a seguir.Para garantir um disparo sem interferencia no trigger do nosso temporizador, conectamos um filtro de 680 nF e uma resistência de pullup de 10k ohm.
Figura 03: Filtro
3. Temporização
O circuito do temporizador foi montado com um LM 555 configurado como um monoestável, já utilizado em práticas anteriores. Seu funcionamento permite elevar a tensão em sua saída para o valor da alimentação e mantê-la assim por um determinado período sempre que um pulso surgir na sua entrada de disparo (trigger). Nesse caso, a tensão de alimentação será de 5V, já que a alimentação do circuito é de 5V. Na saída do 555 teremos um flip-flop que será responsável por gripar o circuito em níveis lógicos 1 e 0, possibilitando ligar ou desligar o LED.
Na entrada do trigger do 555 foi conectada a saída do amplificador. Dessa forma, sempre que o microfone gerar um sinal elétrico capaz de disparar o 555, a saída permanecera por um período de tempo satisfatório ativada. Para que essa constante de tempo seja alcançada devemos calcular seus parâmetros de acordo com a fórmula apresentada abaixo:
T = 1,1 CR
Desejamos um tempo de aproximadamente 8 ms e escolhemos arbitrariamente um capacitor de 680 nF, temos que R deve ser igual a 10,7k ohm. Considerando esse valor, usaremos o valor comercial mais próximo e mais comum, que é 10k ohm. Logo, o novo valor para o tempo será de 7,48 ms.
Figura 04: Circuito temporizador com CI LM555
Na saída do monoestável, conectamos mais um filtro de altas freqüência, o capacitor de 100 nF, e também implementamos um pulldown (resistor de 10k ohm ), buscando evitar que clocks indesejados apareçam no flip-flop.
Figura 05: Filtro
4. Acionamento
Para alternar o estado do LED que será acionado pelas palmas usaremos um flip-flop tipo D, encapsulado no CI 4013. Esse flip-flop, com clock sensível a borda de subida, muda seu estado de saída para o mesmo estado que estiver na entrada D quando um pulso de clock for emitido ao circuito. Nesse projeto, o pulso de clock será a saída do temporizador 555. Para garantir que o circuito irá alternar seus estados a cada pulso de clock, ligaremos o flip-flop como flip-flop tipo T (toogle), onde conectamos a saída Q’ diretamente a entrada D. Assim, sempre que a saída Q estiver em 0, a saída Q’ vai estar em 1. Quando um pulso de clock chegar até o circuito, a saída Q muda para 1, a Q’ para 0 e quando um novo pulso chegar ao clock, a saída Q voltará para 0.
O LED será conectado à saída Q desse flip-flop por meio de uma resistência de 470 ohm. A importância dessa resistência é a limitação da corrente que passa pelo LED. É importante ressaltar que o LED será ligado ao flip-flop, ou seja, a corrente por ele drenada será fornecida por esse dispositivo. Nesse caso não tem muito problema porque a corrente é baixa. Mas para a ligação de outros componentes que drenem uma corrente alta se faz necessário um circuito de acionamento um pouco mais completo, com transistor e até relé, para aplicações que envolvem sistemas de potência.
O LED será conectado à saída Q desse flip-flop por meio de uma resistência de 470 ohm. A importância dessa resistência é a limitação da corrente que passa pelo LED. É importante ressaltar que o LED será ligado ao flip-flop, ou seja, a corrente por ele drenada será fornecida por esse dispositivo. Nesse caso não tem muito problema porque a corrente é baixa. Mas para a ligação de outros componentes que drenem uma corrente alta se faz necessário um circuito de acionamento um pouco mais completo, com transistor e até relé, para aplicações que envolvem sistemas de potência.
Figura 06: Circuito de Acionamento
Conclusão
Figura 07: Circuito de completo
O trabalho proposto integrou o conhecimento adquirido ao longo do semestre e no decorrer do curso de Engenharia Elétrica, como a eletrônica analógica com a digital, representada pelo flip-flop.
O circuito não apresentou muitos problemas no processo de desenvolvimento uma vez que ele foi montado seguindo as etapas explicadas no relatório. Um forte exemplo para esse fato é o tempo estimado para o monoestável foi de 7,48 ms e o obtido na prática de 7,7 ms. Valores esses muito satisfatórios para o que foi projetado.
Esse projeto pode ser considerado um protótipo para uma aplicação mais útil. Uma delas, simples e que pode ser muito usada no dia-a-dia, é o acionamento da iluminação de um determinado ambiente por palmas ou um estalar de dedos. Algumas modificações se fazem necessárias, como a remodelagem da parte de acionamento com a inserção de um transistor ou um relé de potência, mas o corpo do projeto é o mesmo.
Correção
Por Retes em 22/12/2008 03:59
Pessoal,
Uma pequena correção no circuito.
Por favor, utilizem o CD4013 ao invés do 7474 citado no texto (texto já modificado). Usem o desenho esquemático. O 7474 tem uma pinagem e níveis de sinal diferentes do 4013 e não são compatíveis, necessitando alterções no circuito para o funcionamento.
Outras considerações:
- VDD = 5V
- Vss = -5V a -15V
- terra = 0V
- Os valores de capacitores não são críticos.
Thales Alexandre Carvalho Maia
Pedro Felipe Leite Retes
Universidade Federal de Minas Gerais – Escola de Engenharia
Departamento de Engenharia Eletrônica
Curso de Graduação em Engenharia Elétrica
Laboratório de Eletrônica II
Trabalho Prático II
Professor: José Luiz Silvino
Alunos:
Thales Alexandre Carvalho Maia
Pedro Felipe Leite Retes
Departamento de Engenharia Eletrônica
Curso de Graduação em Engenharia Elétrica
Laboratório de Eletrônica II
Trabalho Prático II
Professor: José Luiz Silvino
Alunos:
Thales Alexandre Carvalho Maia
Pedro Felipe Leite Retes





